2. The SNAP Cawa TCWV and CTP Processing System¶
2.1. Overview¶
The key goal of the CAWA project regarding software development, production and dissemination was to implement the proposed algorithms for TCWV and CTP in free and easily accessible open source toolboxes, notably and foremost ESA’s SNAP toolbox. After successful implementation, TCWV and CTP datasets from the full MERIS archive were generated with BC’s ‘Calvalus’ Linux cluster following the project targets. In addition, TCWV from several months of ‘OLCI-like’ input datasets (i.e. MODIS Aqua/Terra products MOD021 and MYD021) were generated. However, the SNAP TCWV and CTP processors are in principle fully portable and can be run on any Linux platform. The procedure for installation and operation is described in this chapter.
2.2. Theoretical Background¶
The motivation and theoretical background for the TCWV and CTP retrieval is summarized in the CAWA project proposal [1]. The underlying algorithms are described in detail in the corresponding ATBDs for TCWV [2] and CTP [3], respectively.
2.3. Processing Environment¶
Most of the TCWV and CTP processing in the frame of the CAWA project has been carried out on BC’s Linux-based processing system (’Calvalus’ = CAL/VAL and User Services), based on the so-called MapReduce (MR) programming model, combined with a distributed file system (DFS). Calvalus uses Apache Hadoop, which is a Java open source implementation of MR and DSF. It gains its performance from massive parallelization of tasks and the data-local execution of code, which avoids expensive network traffic. Actually the Calvalus system has ~90 cores, ~ 1 PetaByte data storage volume. It is extensively used within various projects.
However, as said, the SNAP TCWV and CTP processors can in principle be set up and run on every Linux based computing systems. This is described in more detail in section Processing Software Installation.
2.4. Processor Components¶
The SNAP TCWV and CTP processing system consists of the following SNAP software components and auxiliary datasets:
- snap-core module
- snap-gpf module
- snap-python module
- snap-netcdf module
- s3tbx-idepix module
- snap-cawa plug-in
- snap-cawa-io plug-in
- FORTRAN shared libraries providing high-performance utility functions used in snap-cawa
- lookup tables for TCWV and CTP retrieval
These components are described in more detail in the following subsections.
2.4.1. The Sentinel Application Platform (SNAP)¶
A common architecture for all Sentinel Toolboxes is being jointly developed by Brockmann Consult, Array Systems Computing and C-S called the Sentinel Application Platform (SNAP).
The SNAP architecture is ideal for Earth Observation processing and analysis due to various technological innovations as well as approved concepts from the BEAM toolbox. Most of the software components listed above make use of various SNAP core capabilities.
A good starting point for much more detailed information is the SNAP homepage [4], and also the comprehensive help documentation integrated in the SNAP desktop application.
2.4.2. The SNAP Graph Processing Framework¶
One of the key components in SNAP is the Graph Processing Framework (GPF) for creating user-defined processing chains. Both CAWA TCWV and CTP processors make use of this framework.
Within SNAP, the term data processor refers to a software module which creates an output product from one or more input products configured by a set of processing parameters. The GPF framework was originally developed for BEAM. Since the early days of BEAM, a number of data processors have been developed; some of them are standard modules while others are contributed by 3rd parties. All of these data processors have been developed using a dedicated processing framework which was already part of the first version of BEAM.
Based on the experience collected within a number of projects, the SNAP authors have developed what is now the SNAP Graph Processing Framework. The GPF provides all the features inherited from BEAM, but adds a number of new ones for developers and reduces the amount of source code to write while drastically improving its readability and maintainability.
Much more detailed information on the SNAP GPF is provided by the specific GPF help documentation integrated in the SNAP desktop application.
2.4.3. The SNAP-Python Interface (SNAPPY)¶
A new concept provided in SNAP is the possibility to develop preocessing scripts using Python. This is realized by a new SNAP-Python extension (SNAPPY). This component basically provides a bi-directional communication between Python and Java since the Python extension code must be able to call back into the Java APIs. This communication is realized by the bi-directional Python-Java bridge ‘jpy’, which comes with a number of outstanding features, such as
- Fully translates Java class hierarchies to Python
- Support of Java multi-threading
- Fast and memory-efficient support of primitive Java array parameters (e.g. NumPy arrays)
The jpy Python module is entirely written in the C programming language. The same resulting shared library is used as a Python jpy module and also as native library for the Java library (jpy.jar). This means that
- Python programs that import the ‘jpy’ module can load Java classes, access Java class fields, and call class constructors and methods.
- Java programs with jpy.jar on the classpath can import Python modules, access module attributes such as class types and variables, and call any callable objects such as module-level functions, class constructors, as well as static and instance class methods.
SNAPPY can also be used from the Graph Processing Framework so that in SNAP scientific GPF operators can be developed not only in Java, but now also in Python. In CAWA, both TCWV and CTP processors are making use of this and were written in Python, whereas the pre-processing (i.e. the IdePix pixel classification) uses a GPF processor which was written in Java.
More detailed information on SNAPPY can be found in [5].
2.4.4. The SNAP-NetCDF Module¶
The SNAP NetCDF module provides comprehensive capabilities for NetCDF file I/O within SNAP, based on the set of NetCDF software packages provided by UCAR Unidata. In return the SNAP NetCDF module is used by the snap-cawa-io module which ensures a project-related generation of TCWV and CTP products in CF-compliant NetCDF format. See section The SNAP CAWA Products for more detailed description of the CAWA TCWV and CTP products.
2.4.5. The IdePix Pixel Classification Module¶
IdePix (Identification of Pixels) is a pixel classification tool which has been developed by BC as BEAM plugin and has been used for a variety of projects. The tool works over both land and water and supports a variety of sensors. Among these are MERIS and MODIS, which made IdePix the most appropriate candidate for cloud and snow identification in the CAWA project.
The IdePix tool for water pixel classification was developed in the frame of the ESA DUE project ‘CoastColour’ [6], and the ESA OceanColour CCI project [7]. The classification is mainly based on the algorithms described in [8], chapter 5.
The IdePix tool for land pixel classification was developed in the frame of the ESA DUE project ‘GlobAlbedo’ [9], and the ESA LandCover CCI project [10]. The classification is mainly based on the algorithm used for GlobAlbedo as described in [11].
Although Idepix has been tested and successively improved within GlobAlbedo using a wide selection of regions, also taking into account seasonal variations, some limitations and weaknesses in cloud detection (most of them well known from other existing cloud masking approaches) could not be solved to 100%. These are i.e.
- distinction of cloud and snow/ice is often difficult
- detection of optically very thin clouds
- possible misclassifications over very bright land areas, e.g. deserts or bright beaches
Therefore, within the frame of various projects, the IdePix algorithms are continuously further developed.
In the meantime IdePix has also been integrated in SNAP as modules for both the Sentinel 2 and the Sentinel 3 toolboxes. The latter module (‘s3tbx-idepix’) provides the support for MERIS and MODIS which is needed for CAWA. This module in return makes use of the SNAP Graph Processing Framework (GPF) described above.
The pixel classification with IdePix is the first processing step in CAWA, applied on the MERIS/MODIS L1b products as preprocessing towards the generation of both TCWV and CTP (see Figure 2.1).
2.4.6. The TCWV GPF Processor¶
The TCWV GPF processor is the key component of the SNAP TCWV processing chain. This processor also makes use of the SNAP GPF framework, and also of the SNAP Python interface (SNAPPY) described above. The processor provides the implementation of the TCWV algorithm described in detail in [2].
CAWA TCWV core is meant to be the core of a L1B –> L2 processor, for the retrieval of total column water vapor. It is sensor independend, curently MERIS and MODIS look up tables are provided. It works only for cloud free pixel
Basically, the processor is sensor-independent. However, specific lookup tables are required which are currently provided for MERIS and MODIS. In summary, the processor needs the following inputs:
- normalized radiance (TOA radiance divided by solar constant) at the window and absorption bands [sr-1]
- geometry
- surface (or 2m) temperature [K]
- surface pressure [hPa]
- aerosol optical thickness at the short wave window band
- prior windspeed (for ocean pixels)
- land sea discrimination (as implementations for land and sea slightly differ)
The output of the processor is TCWV [mm] and a TCWV flag (i.e. valid data mask).
The TCWV processing flow is illustrated in Figure Figure 2.1.
2.4.7. The CTP GPF Processor¶
The CTP GPF processor is the key component of the SNAP CTP processing chain. As the TCWV processor, the CTP processor also makes use of the SNAP GPF framework, and also of the SNAP Python interface (SNAPPY) described above. The processor provides the implementation of the CTP algorithm described in detail in [3].
Basically, the processor is also sensor-independent. Again, specific lookup tables are required which are currently provided for MERIS and OLCI. The processor works for all pixel, however only cloudy pixel deliver sensible results. The cloud optical thickness does not account for optical effective radius (missing SWIR Bands), thus it will not be accurate in particular close to cloud/rain bows.
The underlying algorithm has been designed in two versions:
- ‘cloud_core’. A slim and faster version being used for MERIS, only retrieving cloud top pressure and cloud optical thickness.
- ‘cloud_complete_core’, the full version, additionally retrieving cloud profile information. This version had been foreseen for OLCI, but in the end was not realized as GPF processor, as the optional ‘OLCI’ workpackage had been descoped from the CAWA project.
In summary, the processor needs the following inputs:
- normalized radiance (TOA radiance divided by solar constant) [sr-1] at the window and absorption bands (Band 10 and 11 in case of MERIS. The MERIS band 11 is corrected for straylight using coefficients which are provided with the processor module.)
- surface pressure [hPa]
- surface albedo around 750 nm. (An examplarily climatology is provided with the processor module.)
- the precise deviation of the central wavelength from the nominal
The output of the processor is CTP [hPa] and a CTP flag (i.e. valid data mask).
The CTP processing flow is illustrated in Figure Figure 2.2.
2.5. Processing Flow¶
Although the TCWV and CTP processors are completely independent of each other, their individual processing flow is very similar as shown and explained below.
2.5.1. TCWV Processor¶
The overall processing flow of the SNAP TCWV processor is shown in Figure 2.1.
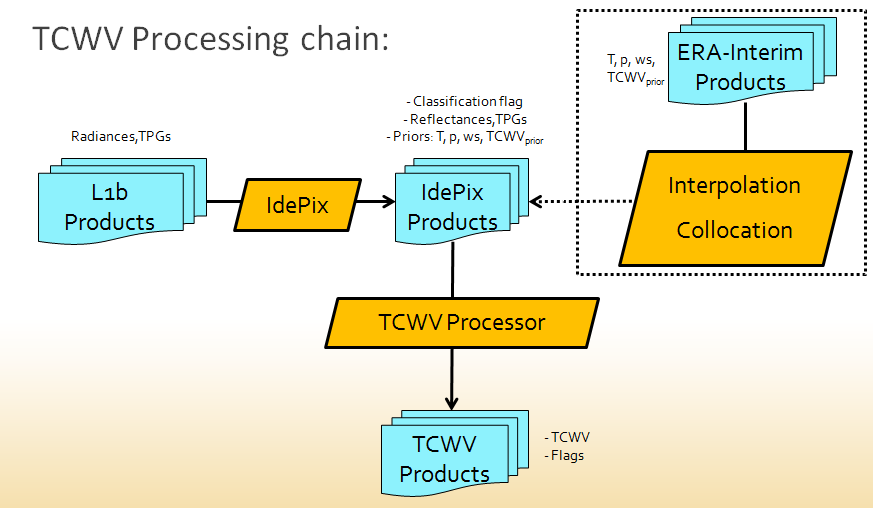
Figure 2.1 Processing flow of the SNAP TCWV processor.
As mentioned, L1b products from MERIS or MODIS are used as input. These products are pre-processed with the IdePix pixel classification module. Idepix provides a classification flag and the reflectance bands (converted from radiances in case of MERIS) needed for the TCWV retrieval. Further optional input (per pixel) are prior values for temperature, pressure, wind speed, and an initial TCWV guess. Ideally, these priors are taken from an external data source to provide values of good quality. For the CAWA TCWV processing on Calvalus, these data were taken from ERA-Interim [12] products which were interpolated and collocated onto the initial L1b/IdePix product grid. If no priors are provided, the processor will use reasonable constant values, but this is not recommended for good TCWV retrievals.
The IdePix products (optionally including the prior bands) are the input for the TCWV processing step, which provides the final TCWV products (TCWV + flag band).
2.5.2. CTP Processor¶
The overall processing flow of the SNAP CTP processor is shown in Figure 2.2.

Figure 2.2 Processing flow of the SNAP CTP processor.
The setup and structure of the CTP processor is very similar to the TCWV processor. Again, the L1b products are pre-processed with the IdePix pixel classification module. A surface albedo climatology value (white sky albedo) is added to the IdePix products, using an internal climatology product (20-day averages) which is included in the processor module. The IdePix products are the input for the CTP processing step, which provides the final CTP products (CTP + flag band).